Soft Robotics : actionneurs sensibles et souples
Les organismes vivants sont en majoritairement constitué de matériaux souples et étirable. Ces tissus souples sont bénéfiques car ils peuvent se déformer afin de s’adapter à des forces extérieures, tout en intégrant des capteurs pour détecter des stimuli externes ou internes. Cette adaptabilité permet aux tissus de s’adapter aux contraintes mécaniques rencontrés, comme la peau et la chair des mains qui changent de forme pour mieux saisir les objets. Au contraire, la plupart des robots actuels sont fabriqués à partir de matériaux durs comme le métal, le plastique et le bois. Bien que ces matériaux soient solides et facilites la fabrication, ils n’ont pas la flexibilité ou la sensibilité des matériaux souples et flexibles présents dans les tissus vivants.

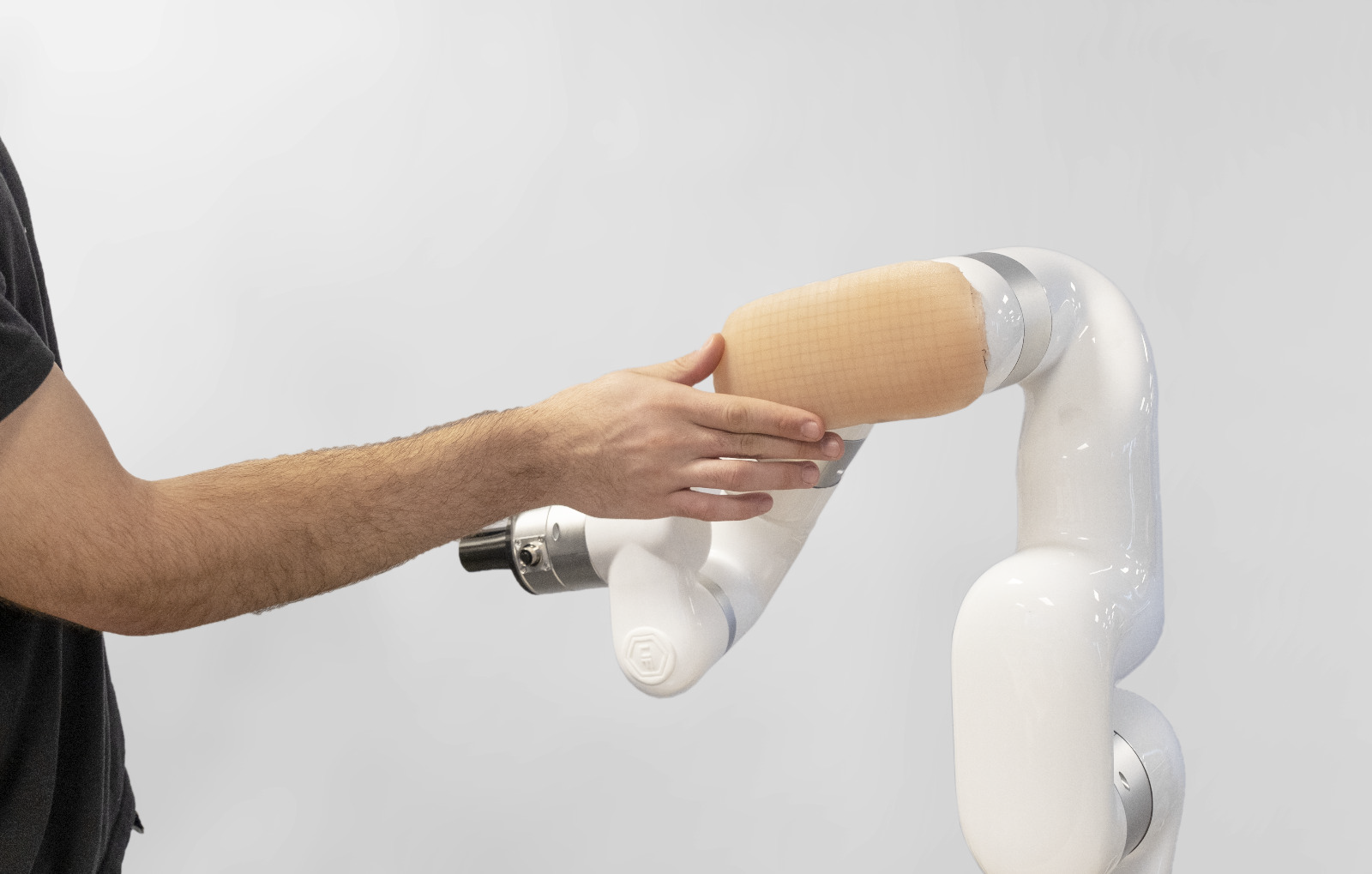
Pinces de robotique souple
« Un robot est un agent physique ou virtuel qui peut percevoir son environnement et agir sur celui-ci » Rodney Brooks.
À partir de cette idée, la robotique souple ou soft robotics a été créée. Elle se concentre sur le développement de robots flexibles et extensibles qui sont hautement adaptables et sensibles à leur environnement grâce à l’intégration de capteurs tout en ayant des actuateurs légers avec un excellent rapport poids/puissance. La soft robotics vise à construire des robots capables de réaliser des tâches nécessitant adaptabilité et flexibilité, comme saisir des objets de forme irrégulière, interagir avec des personnes et être utilisés dans des applications médicales.
Chez Lynxter, l’ingénieur de recherche et développement Brice Parilusyan a fait avancer le domaine en utilisant l’impression 3D silicone pour fusionner des capteurs souples avec des actuateurs souples, créant ainsi des robots souples pouvant à la fois percevoir et intéragir sur leur environnement.
Intégration de capteurs par des techniques de moulage en silicone
Capteurs tactiles souples avec technique de moulage
Les capteurs détectent des stimuli externes et les convertissent en signaux lisibles. Il en existe de divers types, comme les capteurs chimiques, électriques et mécaniques, utilisés dans de nombreux domaines tels que l’industrie ou la médecine. Les capteurs traditionnels sont rigides et ne peuvent pas être utilisés dans certains environnements avec beaucoup de contraintes. Les capteurs flexibles peuvent s’adapter à ces conditions et sont mieux adaptés aux surfaces irrégulières et aux zones à haute pression.
Impression 3D Silicone et soft robotics
Les matériaux utilisés dans les capteurs flexibles mélangent des matériaux conducteurs (les matériaux courants incluent les métaux, le carbone) et des matériaux extensibles (polymères). Leur composition est étudiée afin d’assurer une forte conduction électrique tout en restant flexible et durable. Les capteurs flexibles sont utiles dans de nombreuses applications, notamment dans les interactions entre humains et machines ou en médecine. Dans le cas d’interaction entre humain et machines, Ils peuvent être utiliser pour créer des appareils de contrôle capable de s’adapter à des formes complexes (comme le corps humain) et fournir un retour tactile, améliorant l’expérience utilisateur. En robotique, les capteurs flexibles permettent une manipulation précise et non-destructive, ce qui les rend idéaux pour travailler avec des objets délicats sans causer de dommages.

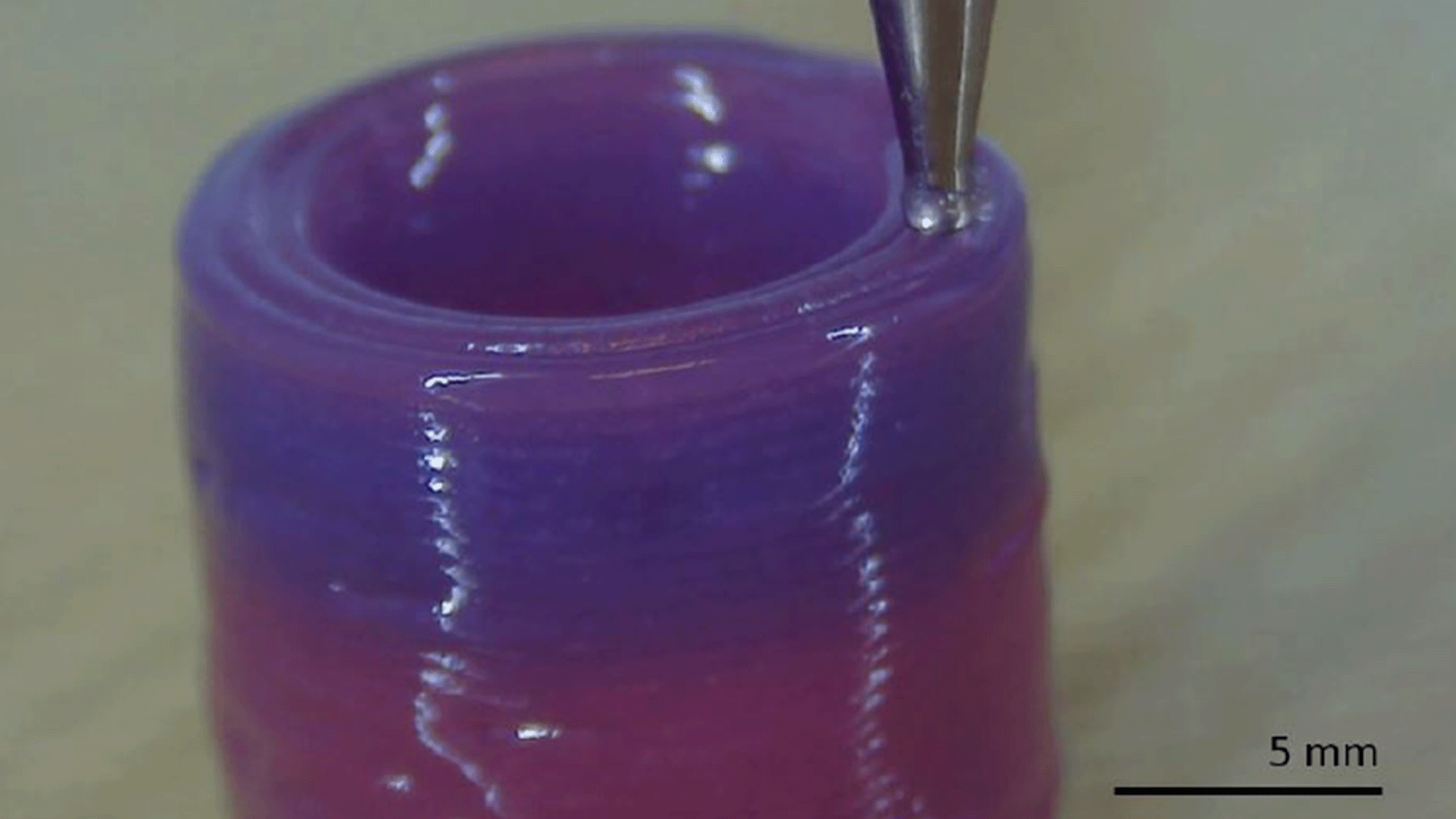
Actuateur souples en silicone avec variation de ratio de mélange du silicone
Actuateurs souples avec impression 3D silicone
Nous allons maintenant nous concentrer sur la manière dont les robots souples se déplacent en utilisant des actuateurs souples.
Les actuateurs souples peuvent utiliser différentes sources d’énergie comme la température, l’humidité ou la pression pour créer du mouvement.
Les actuateurs pneumatiques, alimentés par pression d’air, sont très courants car ils sont simples, bon marché et peuvent être fabriqués avec des matériaux de tous les jours. Ils peuvent se plier, s’étirer, se contracter et se tordre. Les actuateurs souples ont différentes formes selon leurs mouvements, l’un des types les plus courants est l’actionneur PneuNet. Les actuateurs pneumatiques souples sont particulièrement utiles dans les dispositifs médicaux, les interfaces homme-machine et l’industrie. Ils sont flexibles et peuvent saisir et manipuler les objets délicatement, ce qui les rend idéaux pour interagir avec des objets fragiles.
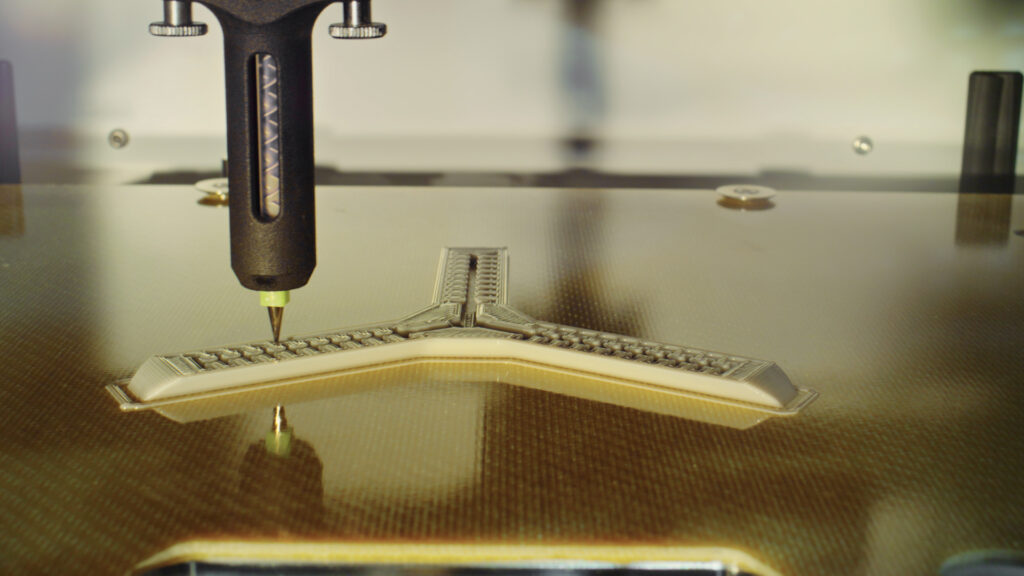
Impression des actuateurs souples avec variation de ratio
Le moulage est l’une des méthodes les plus anciennes et les plus courantes, en particulier pour la fabrication de robots souples utilisant des matériaux comme le silicone. À mesure que la robotique souple s’est développée, les conceptions sont devenues plus complexes et diversifiées. Les méthodes d’impression 3D sont devenues une nouvelle solution, y compris le dépôt de filament fondu (FDM), le frittage sélectif par laser (SLS), l’impression jet d’encre et la stéréolithographie (SLA). Ces méthodes offrent des avantages tels que le prototypage rapide et la haute précision, mais présentent également des inconvénients, comme le choix limité de matériaux.
L’écriture directe d’encre (DIW) ou l’extrusion de matériau (MEX) est mise en avant pour son utilisation de matériaux liquides comme le silicone ou les hydrogels, permettant des conceptions flexibles. Le MEX est prometteur pour la robotique souple, mais des défis restent à relever pour optimiser l’impression multi-matériaux et intégrer des capteurs.
La fabrication MEX peut modifier les propriétés mécaniques des structures en silicone imprimées en variant la hauteur de couche par exemple. En ajustant le ratio de mélange des parties en silicone, nous pouvons créer différents niveaux de rigidité et de résistance au sein d’une seule pièce imprimée. Cette méthode facilite la production d’actuateurs pneumatiques avec des propriétés de déformation spécifiques pendant la fabrication sans nécessiter de conceptions multi-matériaux complexes. Ces deux méthodes ont été mises en œuvre sur la S600D à l’aide d’une tête d’outil personnalisée développée spécifiquement pour cette recherche. Cela a été rendu possible grâce aux fonctionnalités ouvertes de l’imprimante 3D. (vous pouvez en savoir plus à ce sujet dans cet article)
Cette technologie souligne la nécessité d’améliorer les processus de fabrication pour répondre aux exigences évolutives de la robotique souple, visant des conceptions plus avancées et multi-matériaux.
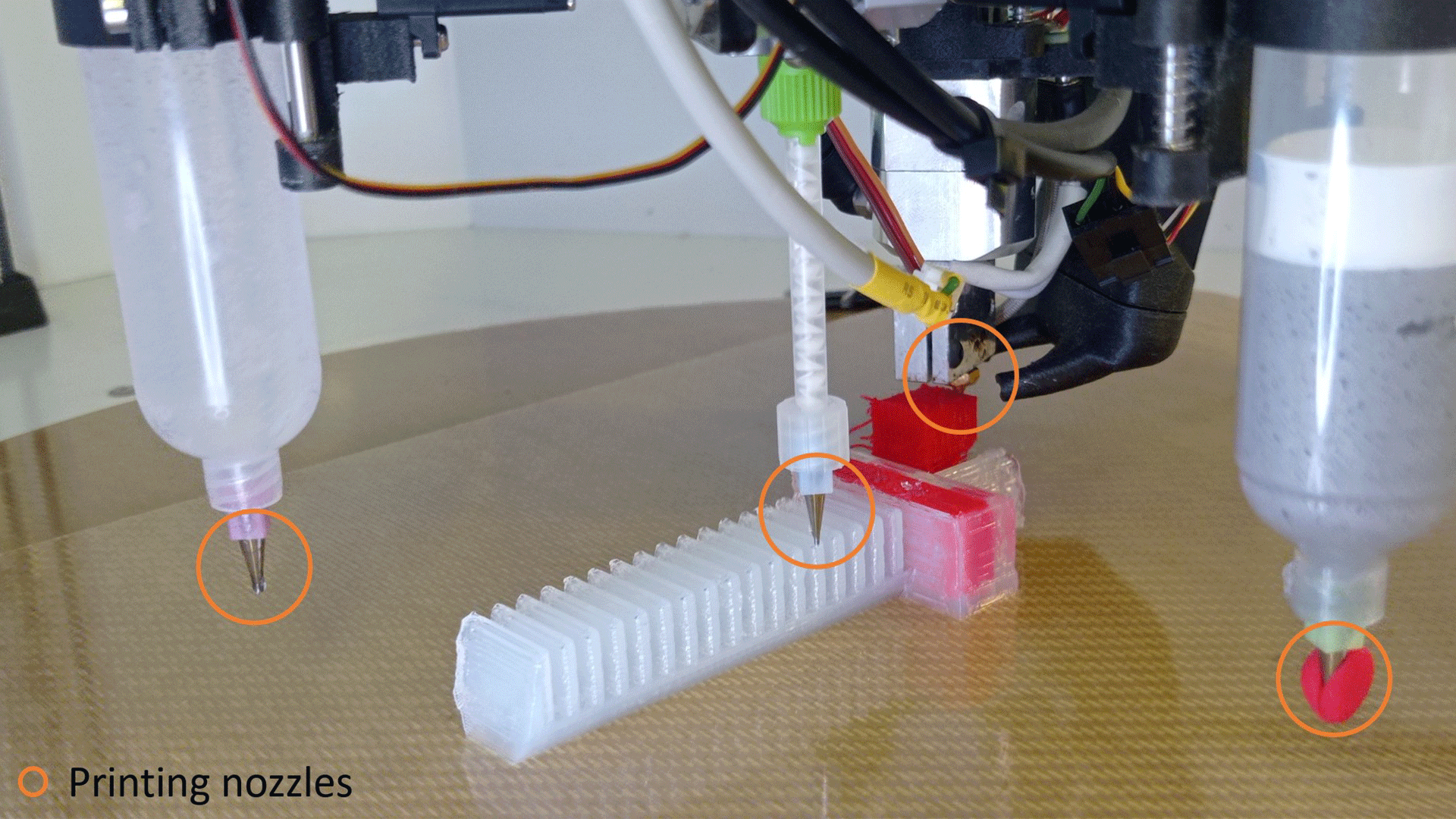
Impression multi-matériaux de robot souple avec tête d’outil personnalisée utilisant 4 buses d’impression : gel/silicone/thermoplastique et matériau conducteur
Combiner des capteurs et des actuateurs avec l’impression 3D silicone : actuateur sensible et souple
Par définition, les robots intègrent à la fois des parties de détection et des parties d’actionnement. Alors que la robotique traditionnelle est constituée de plusieurs petits composants connectés, les robots souples sont souvent une structure complexe unique. Ce système monolithique ne permet guère la connexion de petits composants, et tout est fusionné lors de la fabrication. Ainsi, les capteurs peuvent être intégrés directement à l’intérieur des actuateurs et doivent supporter les contraintes mécaniques induites par les mouvements et les étirements des actuateurs.
La fabrication d’un robot souple intégrant plusieurs matériaux et fonctionnalités est un défi. Leur processus de fabrication peut encore être amélioré en raison de problèmes de répétabilité et d’étanchéité. Cependant, l’impression 3D évolue pour répondre à ce défi afin de rendre les robots souples capables de percevoir et d’interagir avec leur environnement de manière fluide.
Recherche
La thèse de Brice Parilusyan pose la question de comment fabriquer ces capteurs et actuateurs par impression 3D en silicone pour assurer leur intégration et leur bon fonctionnement, ainsi que l’impact que ce processus de fabrication aura sur la pièce finale. La question posée est : Comment fabriquer des actuateurs souples et sensibles sans contraintes de forme pour la robotique souple ?
Téléchargez la thèse complète de Brice Parilusyan (disponible en anglais)