La soft robotics : révolution de l’impression 3d silicone
Vous avez déjà entendu parler de la soft robotics ? Déformable, flexibles et doux, ces nouveaux robots pourraient bousculer l’industrie 4.0 : Découvrez comment l’impression 3D Silicone peut lui être un véritable atout, et comment Openlab de Schneider Electric utilise la soft robotics et la S600D de Lynxter pour réaliser un prototype de préhenseur.
DÉFINITION: LA SOFT ROBOTICS
La soft robotics, ou la robotique molle en français est une technologie qui a pour but de créer des robots presque entièrement « mous » : leurs articulations et leurs mouvements sont flexibles grâce à l’utilisation de matériaux ou structures souples, élastiques, pliables ou facilement déformables.
Très bien mais d’où ça vient ? Ce domaine est une évolution naturelle de la robotique. Elle est apparue avec le développement des silicones techniques et de procédés innovants comme la révolution de l’impression 3D. Ces solutions permettent aujourd’hui d’élargir de façon significative la kinésie robotique en intégrant des mouvements mécaniques de compression d’étirement, détorsion, et de gonflement. Le robot possède alors une mécanique de mouvement plus souple et plus douce, certains peuvent par exemple reproduire le mouvement d’ondulation et de torsion des tentacules.
La manipulation d’objet se fait de façon plus précise et mesurée : les robots mous diminuent drastiquement le risque de danger et de détérioration du milieu environnant lors d’intervention. Il s’agit d’une solution qui convient parfaitement à un environnement inconnu ou instable et à la saisie d’objets fragiles dans le domaine alimentaire, spatial ou le secteur de la robotique médicale par exemple.

Prototype de robot mou – préhenseur réalisé par le service R&D de Lynxter
LES APPLICATIONS DE LA SOFT ROBOTICS
La soft robotics est aujourd’hui considérée comme une nouvelle branche de la robotique.
Bien qu’essentiellement au stade de prototype ou de projets confidentiels, ces robots mous représentent une réelle avancée en termes de sécurité, de robustesse et de réduction des coûts car ils sont peu cher à fabriquer et apportent une polyvalence et une souplesse innovante.
Elle est aujourd’hui testée dans le cadre d’opérations qui demandent beaucoup de minutie dans des milieux fragiles comme lors de certaines interventions microchirurgicales : des robots miniatures se faufilent dans des zones difficiles et peuvent déposer des médicaments sur des endroits ciblées. Le robot mou permet alors de travailler au contact de tissus et de cellules sans risquer de les endommager.
Cette technologie peut aussi etre utilisée pour l’étude de récifs coraliens où la douceur des mouvements est nécessaire à la préservation de l’environnement sous-marins.
Complémentaires à la robotique industrielle actuelle, les préhenseurs souples permettent d’élargir la typologie d’objets saisis comme des aliments sensibles (fruits, légumes, gâteaux) sans les abimer. La conception de ceux-ci rend possible l’agrippement d’objets d’une grande diversité au niveau de leurs formes, leurs textures, leurs poids et de leurs volumes.
L’industrie évolue actuellement vers des robots devant collaborer directement avec les opérateurs. Ces robots collaboratifs ou « cobots » ne peuvent être mis en activité avec des robots trop rigides et trop rapides qui présentent un grand risque pour leur utilisateur en cas de choc. C’est donc grâce à la soft robotics que ce système de production peut se développer : sa conception souple assure la sécurité de la machine et de l’utilisateur.
L’IMPRESSION 3D SILICONE ET LA SOFT ROBOTICS
La soft robotics est possible par l’utilisation de matériaux souples comme le silicone, le plastique, le caoutchouc et autres polymères, et/ou par une structure mécanique flexible et légère. La mise en mouvement du robot mou alors passe essentiellement par la déformation de sa structure.
Le choix du polymère devient une composante essentielle de son développement et de sa fonction : les matériaux utilisés doivent répondre aux exigences de l’environnement dans lequel le robot évolue : inertie chimique, isolation électrique, température, friction, alimentarité…
Cette nouvelle approche s’appuie sur une meilleure maîtrise des matériaux polymères souples et sur des imprimantes 3D capables d’imprimer des élastomères de plus en plus performants.
Avec ses excellentes propriétés isolantes, sa résistance à de hautes températures, sa résistance chimique mais surtout ses capacités d’allongement, le silicone est un polymère extrêmement employé en soft robotics. Grâce à l’imprimante 3D S600D et à la tête outil LIQ21 capable d’imprimer des matières liquides, l’impression 3D de silicone devient possible et se met au service de la robotique. L’impression 3D de silicone offre par exemple la possibilité de réaliser de nouvelles formes audacieuses. Contrairement aux procédés traditionnels de moulage, ces impressions silicone peuvent être constituées de géométries internes complexes (ex : microcavités, nid d’abeille) qui ne seraient pas réalisables sans l’impression 3D. Aujourd’hui une gamme de RVT1 et RTV2, de 10 à 40 shore A est déjà disponible sur l’écosystème Lynxter et utilisée dans différents secteurs.
Allier impression 3D silicone et soft robotics ouvre la voie vers de nouvelles possibilités et développements, notamment sur des sujets clefs comme l’auto-réparation et l’autoréplication des robots par intelligence artificielle.

Prototype de doigts du préhenseur réalisé par Openlab – Schneider Electric
Prototype du préhenseur réalisé par Openlab – Schneider Electric
CAS D’APPLICATION DE l’IMPRESSION 3D SILICONE
LE ROBOT SOUPLE D’OPENLAB – SCHNEIDER ELECTRIC
Munie de nombreuses imprimantes 3D dont la S600D de Lynxter, l’unité de prototypage de Schneider Electric « Openlab » expérimente de nouveaux projets en vue d’accélérer l’innovation de nouveaux produits et d’améliorer la rentabilité sur ses lignes de production.
Un de ses projets a pour objectif de produire une ligne de production flexible et modulable qui s’adapte à tout type de nouveaux projets et pouvant travailler sur différentes formes de pièces. Le module développé doit s’adapter à un bras “cobot” et assurer la sécurité de l’opérateur qui travaille à proximité, l’équipe d’Openlab de Schneider Electric s‘est naturellement orienté vers la soft robotics.
Elle a réalisé le prototype d’une pince en silicone à plusieurs « doigts » compatible avec un bras robotisé. Grâce à la S600D de Lynxter, chaque doigt a été imprimé en silicone, cette solution apporte une grande réactivité pour itérer le design et pour changer la configuration de la pince selon le projet de ligne de production en cours.
L’impression 3D industrielle apporte une flexibilité et une liberté de forme : elle permet de changer la configuration de la noix d’assemblage et d’ajouter différents modèles de « doigts » en silicone en seulement quelques heures. Le processus de production robotisé gagne alors en flexibilité et modularité.
Pour réaliser cette pince, l’équipe d’Openlab a tout d’abord conçu le dessin 3D du doigt optimisé pour l’impression 3D en silicone. Ce doigt s’articulera grâce l’envoi d’air comprimé (environs 0,6 bar).
Le doigt est composé de 2 parties :
• Le corps du doigt présente une série de chambres de forme pyramidale. En se gonflant d’air, les chambres se déploient, impliquant le mouvement de flexion du doigt. Les chambres ont été dessinées en respectant les règles de conception liées au procédé.
• L’extérieur qui doit attraper et maintenir la pièce respecte-lui un design denté avec une large encoche pour la retenue. Le bout du doigt est plein afin qu’il retrouve sa forme initiale par gravité lorsque l’air est expiré.
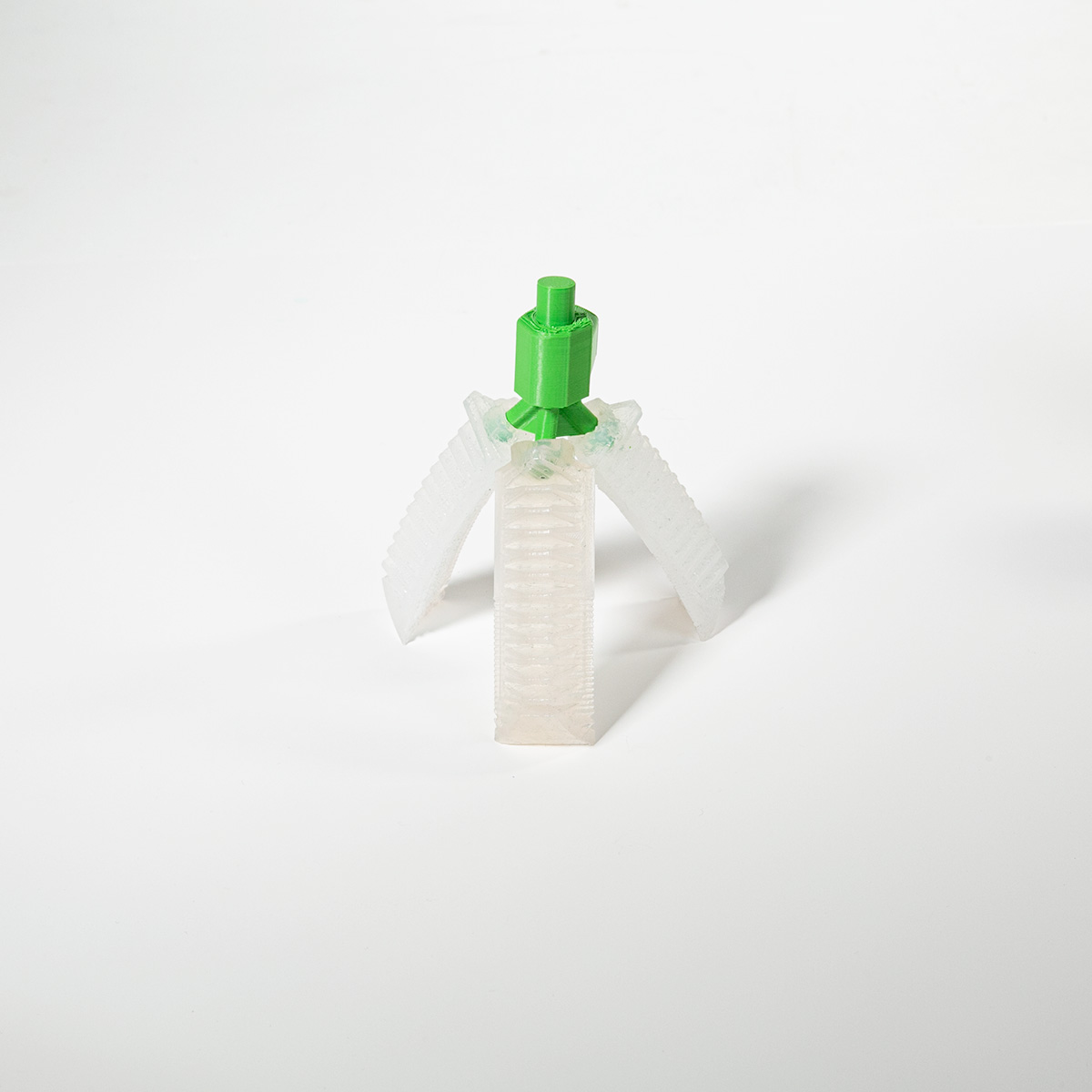
Prototype du préhenseur réalisé par Openlab – Schneider Electric
Les doigts ont été imprimés en silicone RTV2 40 shoreA avec l’imprimante 3D professionnelle S600D de Lynxter. Ce prototype de pince sera dans un premier temps utilisé sur une ligne témoin avant d’être optimisé et dupliqué. La pince pourra par exemple saisir des objets cylindriques de ⌀20mm x 25mm pour en faire le tri grâce à la reconnaissance vidéo et participer ainsi au machine learning pour optimiser continuellement la performance des lignes de production.
Le choix de la S600D pour les projets de soft robotics permet une forte réactivité grâce la modularité de la machine. En changeant simplement de tête-outil, la S600D peut assurer l’impression d’un nouveau support de préhenseur en filament thermoplastique et de doigts en silicone et permet alors au robot de changer de forme rapidement et simplement.
La soft robotics est aujourd’hui un domaine qui évolue vite et qui demande de nombreuses recherches sur les matériaux flexibles et élastiques et leurs comportements.
Avec la S600D, et la technologie d’impression 3D silicone, Lynxter participe activement à relever ces nouveaux défis scientifiques et technologiques.
Références :
https://www.sciencesetavenir.fr/high-tech/un-robot-en-materiau-mou_35284
https://en.wikipedia.org/wiki/Soft_robotics
https://rm.is.mpg.de/research_fields/bioinspired-soft-actuators-sensors-robots-and-machines