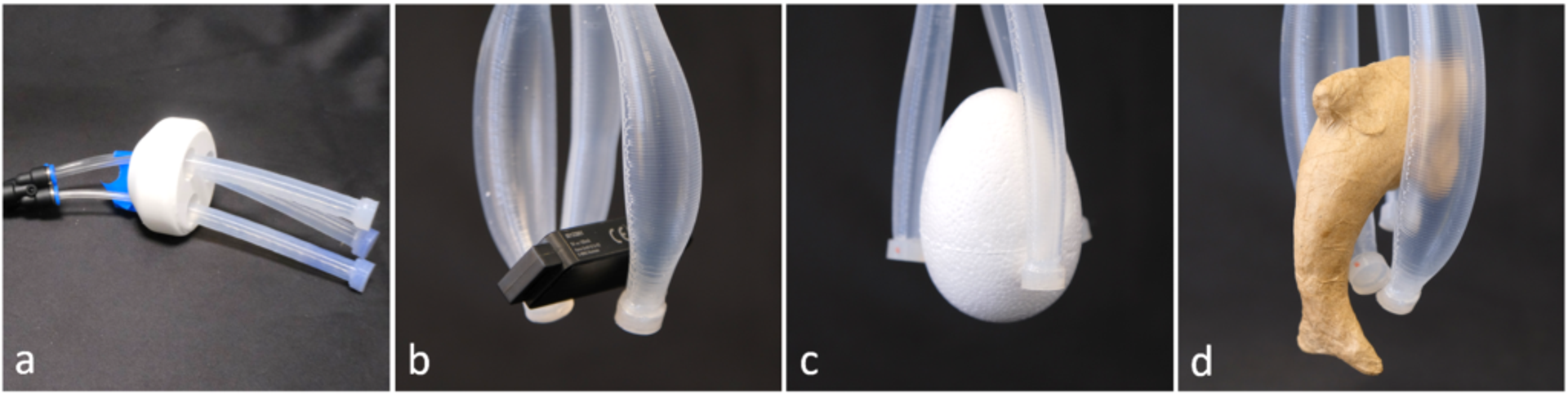
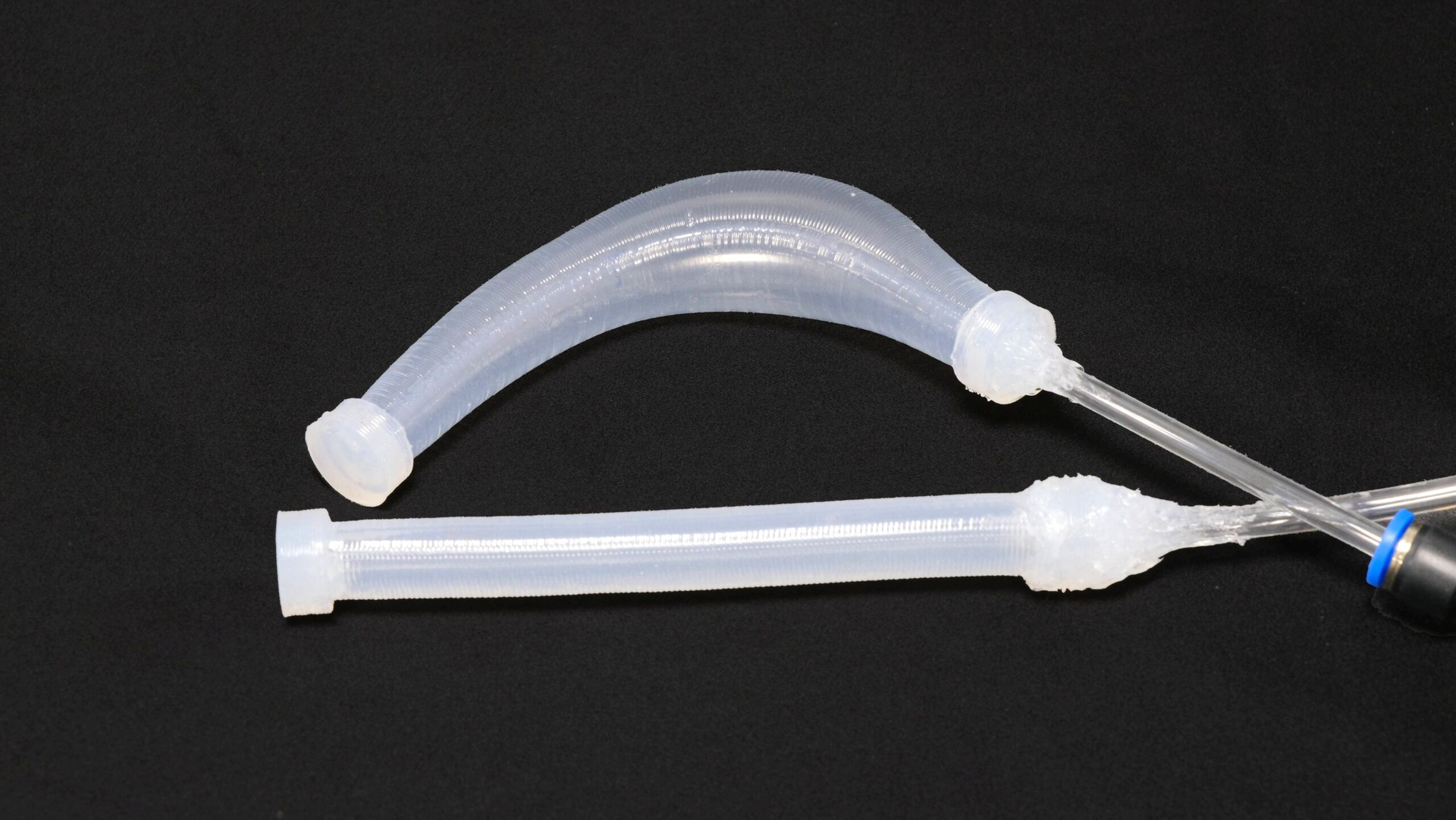
3D printed Soft Pneumatic Actuator using our LLS fabrication technique. (Bottom) The actuator shape is unaltered when non-pressurized. (Top) The actuator bends when pressurized.
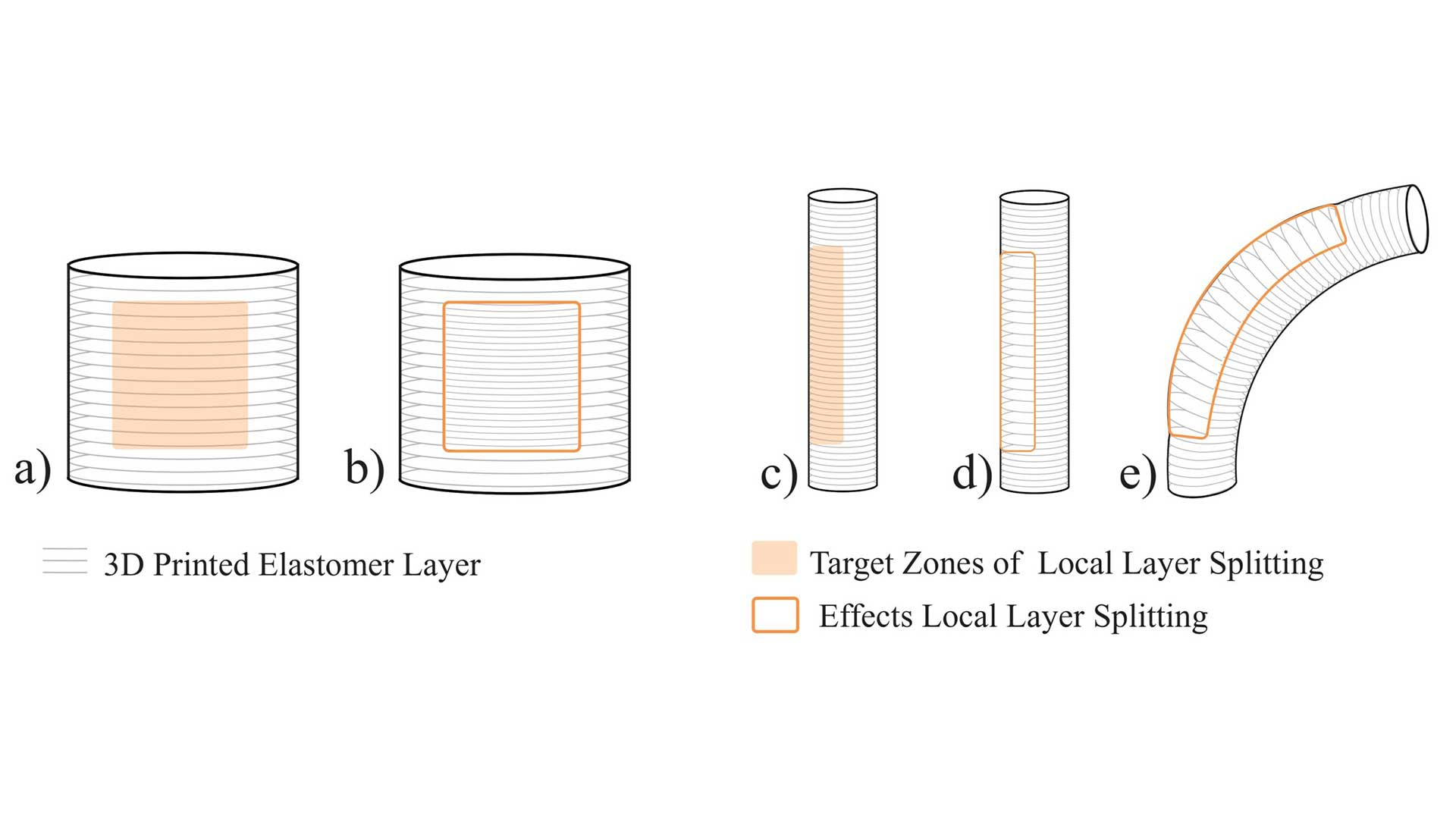
Illustration of LLS technique. (a) A 3D printed part, the orange area, is the target of LLS. (b) The framed area shows the effect of LLS, leading to a different layer height. (c) Cylindrical illustration of a SPA with a target zone of LLS. (d) The effect of LLS in the relaxed state and (e) shows the actuator in an inflated state.
LOCAL LAYER SPLITTING: THE FABRICATION METHOD
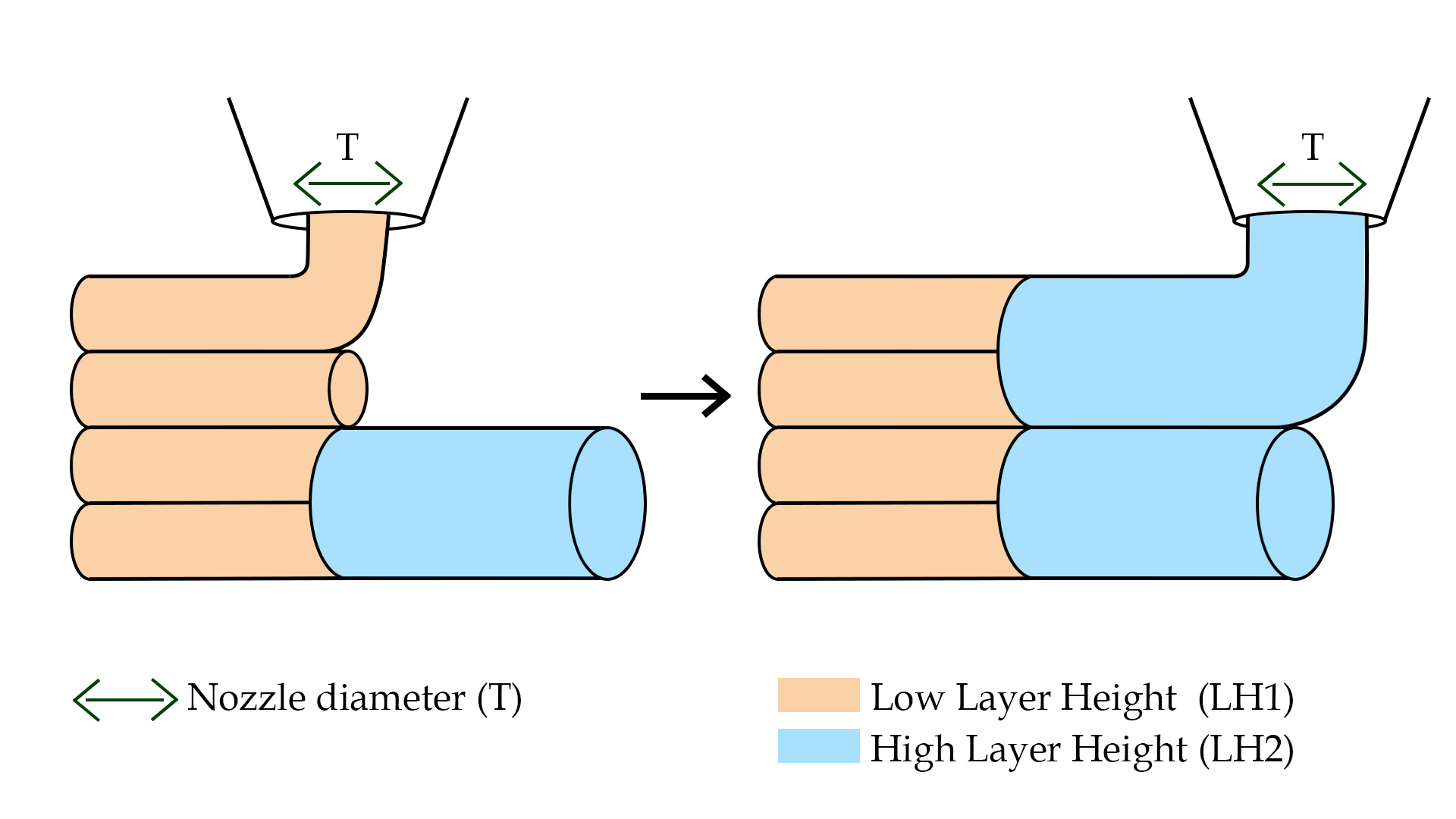
Illustration of the LLS 3D printing process.
Revolutionizing Soft Pneumatic Actuator Fabrication with Silicone 3D Printing and Robotics
IMPACT AND APPLICATIONS OF LLS
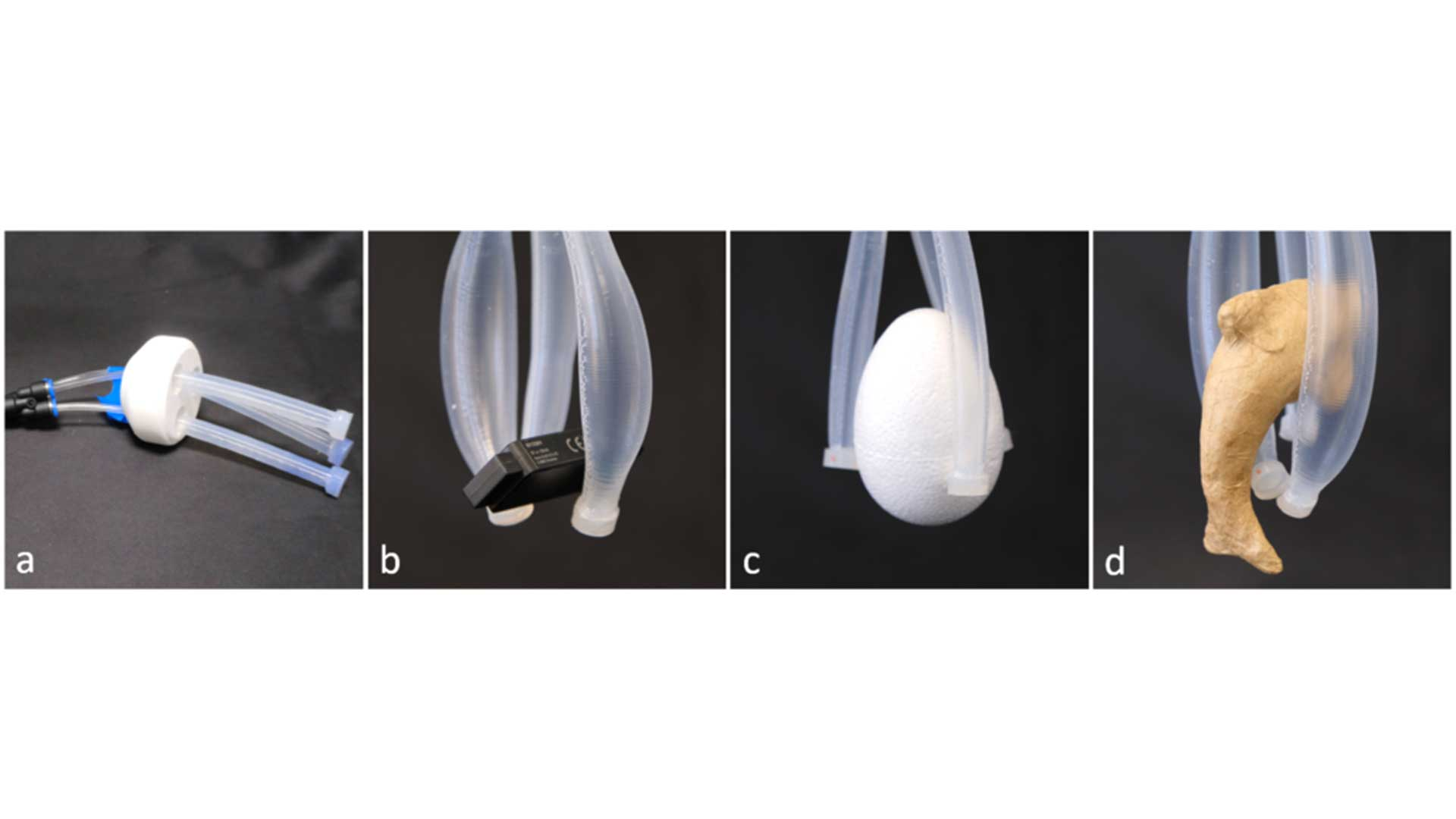
Three-finger gripper grasping test. (a) Two fingers have a nozzle diameter T= 0.86mm and the last T= 0.69mm to deliver increased strength, thus simulating a thumb.
DISCUSSION AND FUTURE WORK
